-

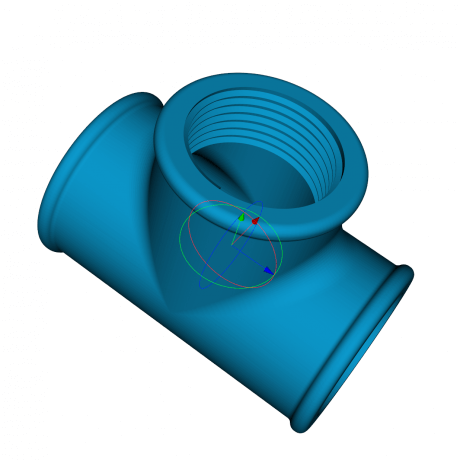
Fügen Sie ein CAD-Modell ein
-
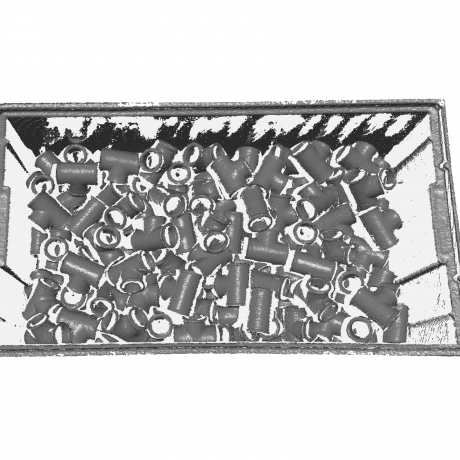
Nehmen Sie die 3D-Szene auf
von PhoXi 3D Scanner -

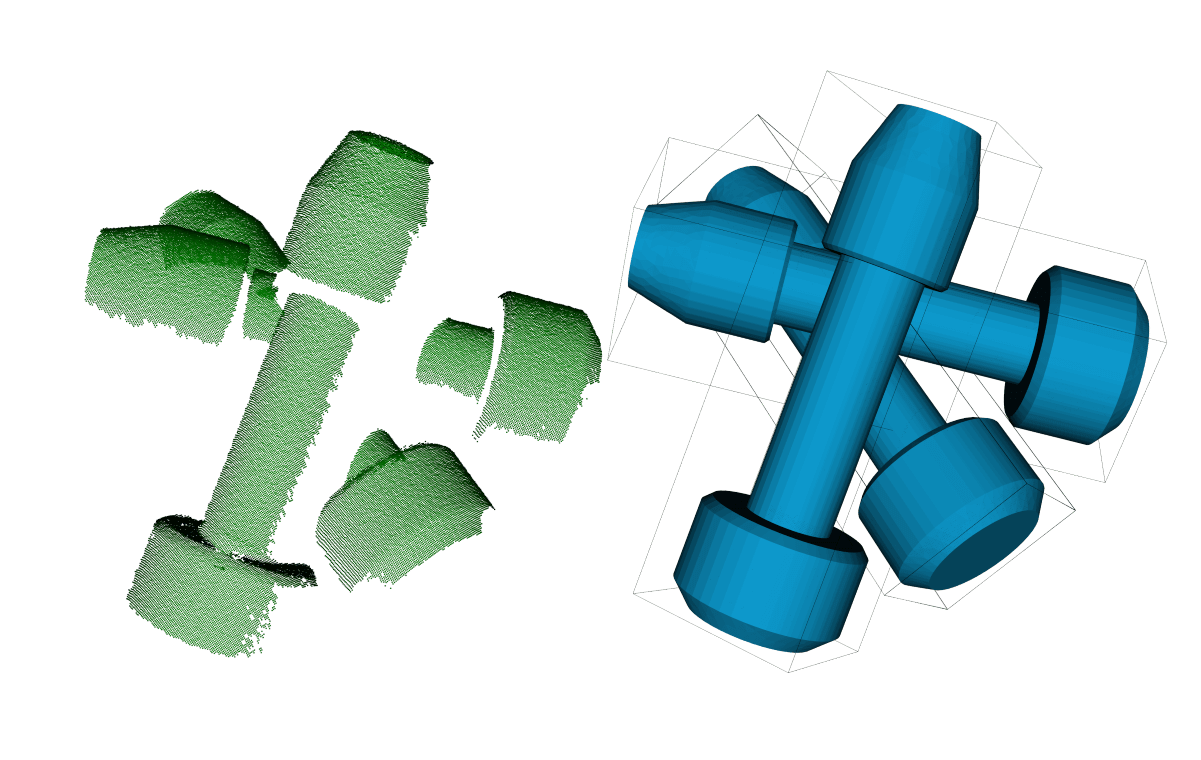
Erhalten Sie lokalisierte Ergebnisse
Anwendungen
Objekterkennung
Profitieren Sie von der Arbeit in der realen 3D-Welt und lösen Sie Probleme, bei denen 2D-Techniken fehlschlagen. Lokalisierungs-SDK erkennt schwarzes Objekt auf schwarzem Förderband, unterscheidet Objektminiatur von seiner realen Version und findet auch teilweise versteckte Objekte.
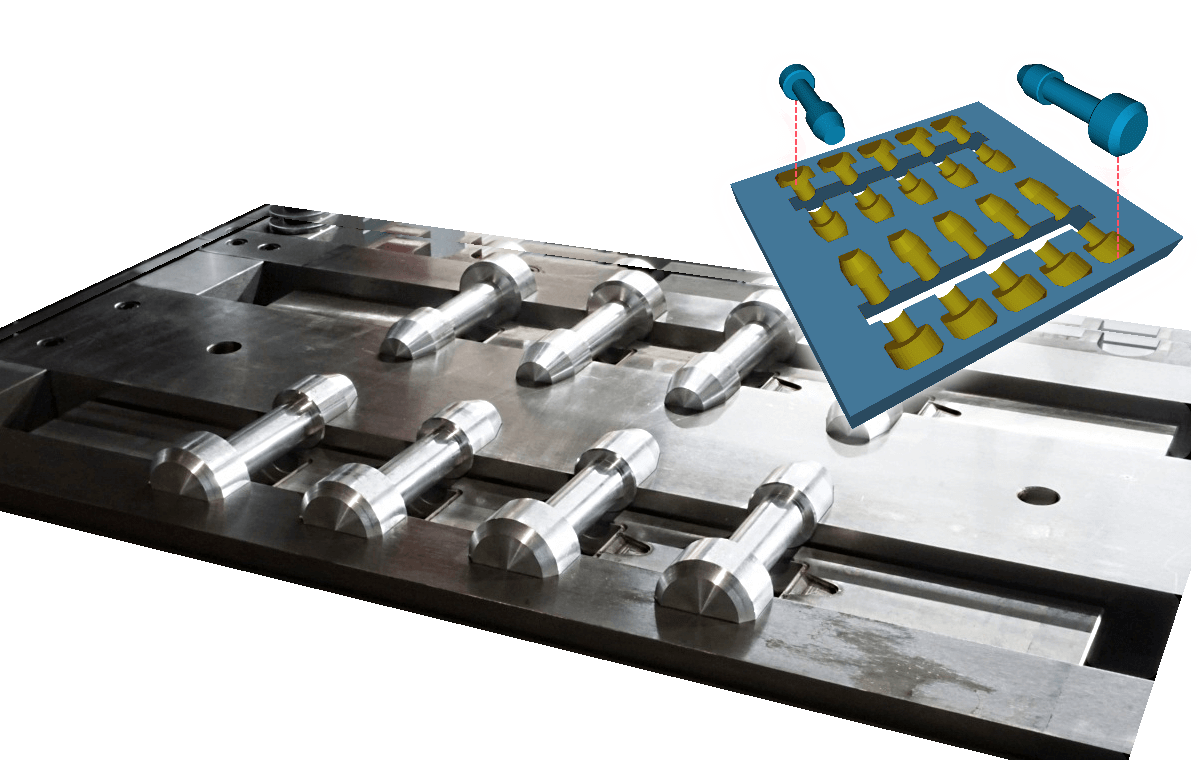
Bin picking
Um das richtige Objekt erfolgreich aus dem unorganisierten Satz zu holen, muss ein Teil ausgewählt werden, auf das der Greifer zugreifen kann. Durch die erweiterte parallele Lokalisierung können schnell mehrere Objektinstanzen gefunden und diejenigen ausgewählt werden, die für die Auswahl am besten geeignet sind.
Platzieren des Objekts
Die Suche nach dem Objekt und die „Negation des Objekts“ sind zwei Seiten derselben Medaille. Daher ist es plausibel, das SDK zu verwenden, um den richtigen Ort für die Objektplatzierung zu finden, sei es über dem anderen Objekt oder in einer Form.
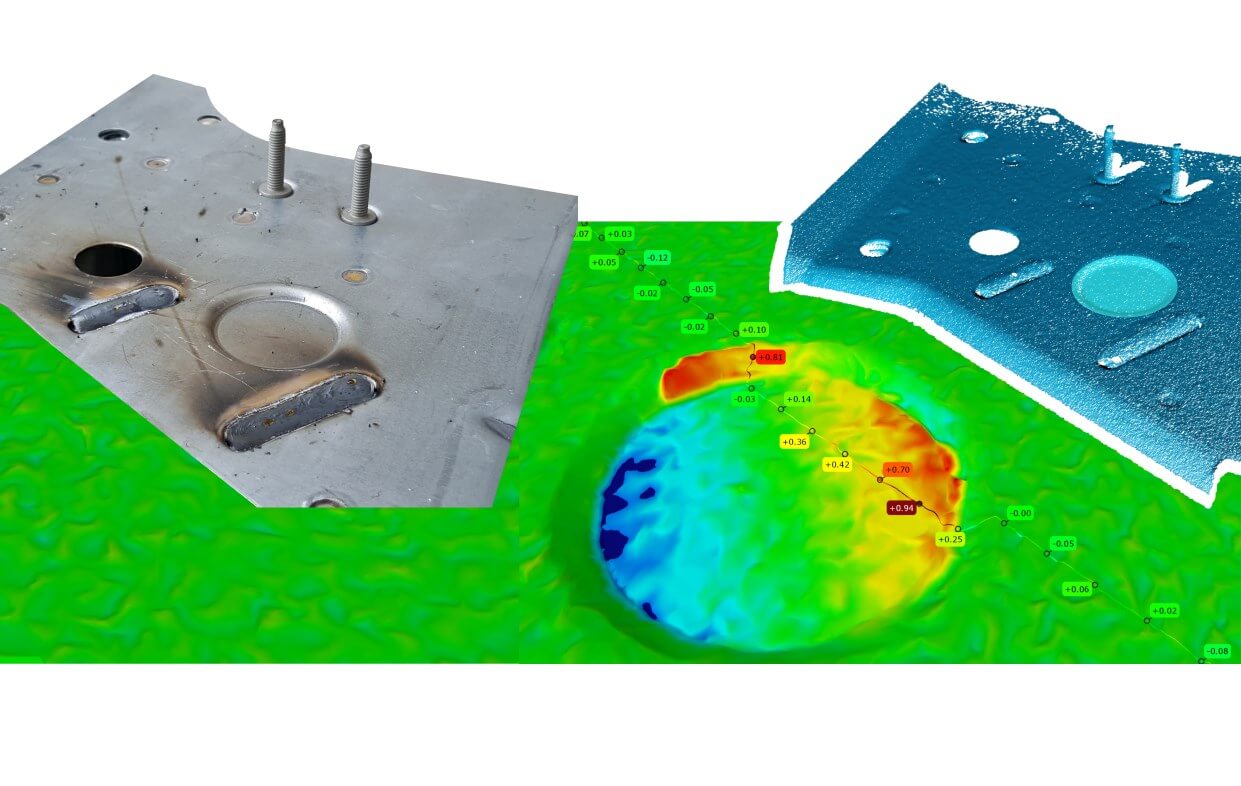
Inspektion und Analyse
Die Ausgabe aus der 3D-Lokalisierungsbibliothek kann weiter verwendet werden, um den gegenseitigen Abstand und die Ausrichtung mehrerer Objekte im Vergleich zum CAD für die Qualitätsprüfung, Teilekonfiguration oder Schaum-, Leim- oder Schweißdickenanalyse zu messen.
Implementierungen
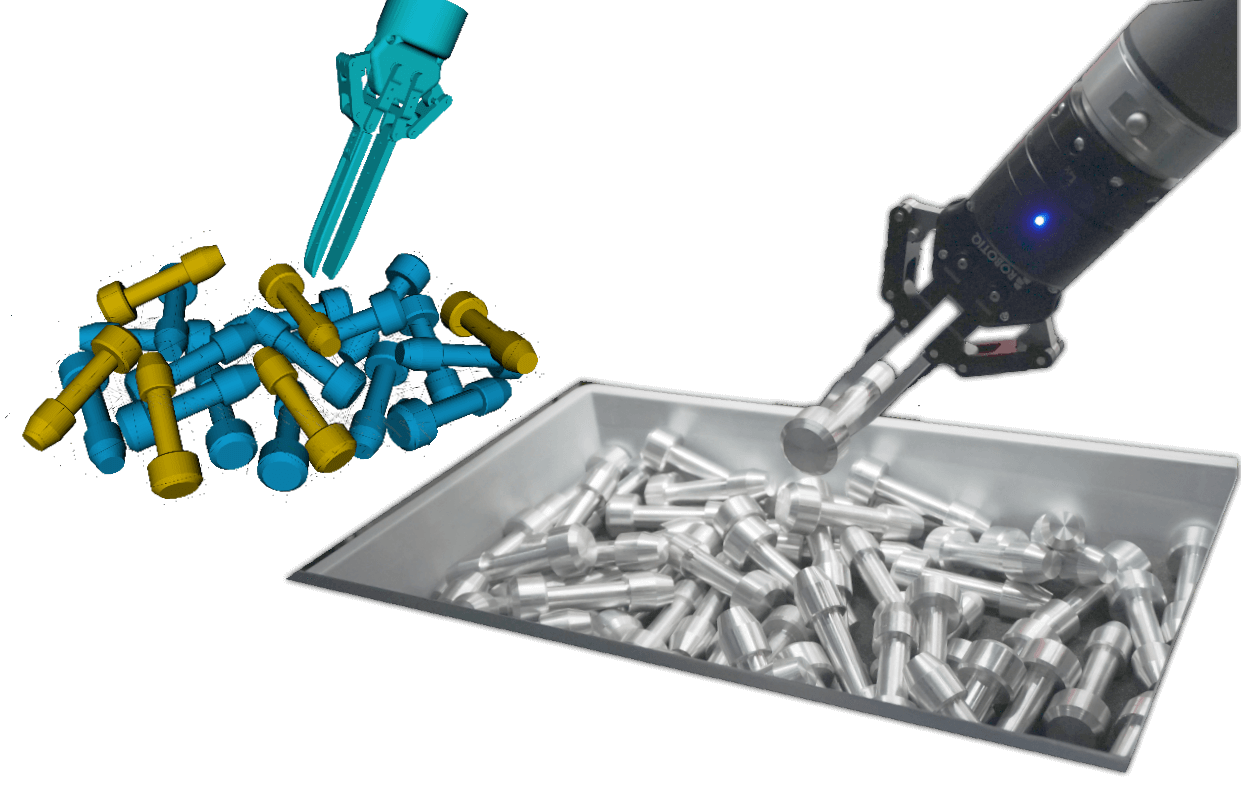
Bin picking
Randomly placed parts are scanned by PhoXi 3D Scanner M. Localization SDK finds exact parts positions and selects the one that can be gripped. Universal Robot 5 picks selected part avoiding collision and place it into the form for injection molding. Partner: ROMI Industrial Systems. More about bin pickingEigenschaften
-
Einfach zu verwendende grafische Benutzeroberfläche zur Konfiguration des Lokalisierungsprozesses
-
Robuste Erkennung und Lokalisierung von verschlossenen Teilen in Bezug auf den potenziellen Greifpunkt
-
Parallele, gleichzeitige Lokalisierung mehrerer Instanzen, asynchroner Ergebnisstrom
3D Lokalisierung
Testen Sie das Lokalisierungs-SDK oder erkunden Sie vollständige Lokalisierungslösungen.