Photoneo Localization SDK 1.3 is here!
After the release of the PhoXi Control application version 1.2, Photoneo was busily working on Photoneo Localization SDK 1.3 to bring the benefits of the recent improvements to end-users and to Bin Picking Studio 1.4.
How will you benefit from the new version of Localization SDK?
Besides general stabilization and speed improvements, you can look forward to the following features:
Define your localization volume
During the localization process, the whole scanned area is searched for objects. This can take quite a time especially in situations where the PhoXi 3D Scanner sees more than just the objects you want to find. Therefore we introduced a scene clipping box. In the Photoneo Localization Configurator, you can easily define the volume where your objects are placed and the Localization will focus only on that volume. Besides speedup, there is another great benefit – if you have two boxes with the same objects, you can tell the Localization to look only into one of them.
Enjoy the support of different formats
If you want to test and evaluate different settings of the Localization, you may not want to be connected to the scanner the whole time to compare the results on the same set of scenes. Having a set of PRAW files, you were able to load them in Photoneo PhoXi Control and connect the Localization to a virtual scanner. Now it is even easier! Photoneo Localization SDK 1.3 allows you to directly load PRAW files from both Photoneo Localization Configurator and C++ API.
Choose the right imperial units
Are you using inches as units of your CAD models? No problem. You don’t need to export models for the Localization in different units. You can choose the right units during model loading.
Connect your MotionCam-3D
Although the award-winning MotionCam-3D is still an engineering sample, we added experimental support to the Localization SDK. Please note that the Camera requires PhoXi Control 1.3.
Get a better understanding with our new C++ API examples
Because clear explanations go hand in hand with relevant illustrations, we added new C++ API examples. To make each example as simple as possible, we focused on one functionality at a time and also tried to cover questions frequently asked by our customers – e.g. how to programmatically generate a configuration file (PLCF).
Solve issues easily with our robust error handling
Every application encounters errors when certain prerequisites are not met – e.g. when the file you want to load is corrupted. Therefore we focused on a more robust error handling in Photoneo Localization Configurator and C++ API, especially on problems related to file loading and communication with PhoXi devices. You will get notified about experienced problems in a transparent and understandable way. You will find new exceptions in the C++ API and new explanatory messages in the Photoneo Localization Configurator.
Learn about the individual settings functions
Configuring Localization is not an easy task, therefore we made some improvements to help you as much as possible. If you are not certain about the individual settings functions, you can hover with the cursor over each setting in the Advanced Settings window to see a short tooltip or click the button next to the setting to see a longer description (as you know it from the PhoXi Control). Alternatively, you can refer to our User Manual or contact our support team that will gladly help you.
Compatibility with other Photoneo software
PhoXi Control:
The minimal required version of PhoXi Control is 1.2.14.
Robot-Camera Calibration Tool:
The minimal required version of Robot-Camera Calibration Tool is 1.3.0.
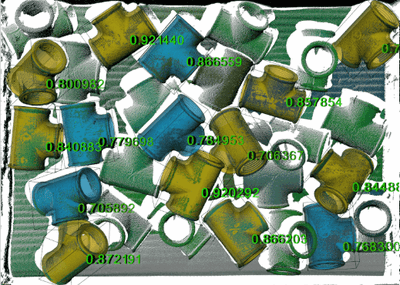
Filter your results
Photoneo Locator is good for table picking of objects with approximately the same orientation. Objects placed on the edge or wrong side may not be pickable. Therefore we implemented a new functionality to filter found objects based on the maximum allowed approach angle. This way you can define pickable objects and only objects that pass the filter are sent to the robot. The Locator GUI now visualizes all found objects, not just the ones that are sent to the robot. Objects sent to the robot are blue, other pickable objects are green and objects that are not pickable are marked in red.