Supreme 3D vision system
PhoXi 3D Scanner family with a wide variety of scanning volumes and track record of being used in the harshest industrial environments.
Robotic manufacturing lines are built for transforming components and material to products and goods. While these systems are super-efficient on output it is still very expensive to prepare material on the input. There are several options.It is either operator placing a metal sheet on static fixtures then feeding machines that can handle one type of material or paying a supplier for fulfilling stacking patterns. This is where the benchmark of vision-guided robotics was born.
It is either operator placing a metal sheet on static fixtures then feeding machines that can handle one type of material or paying a supplier for fulfilling stacking patterns. This is where the benchmark of vision-guided robotics was born.
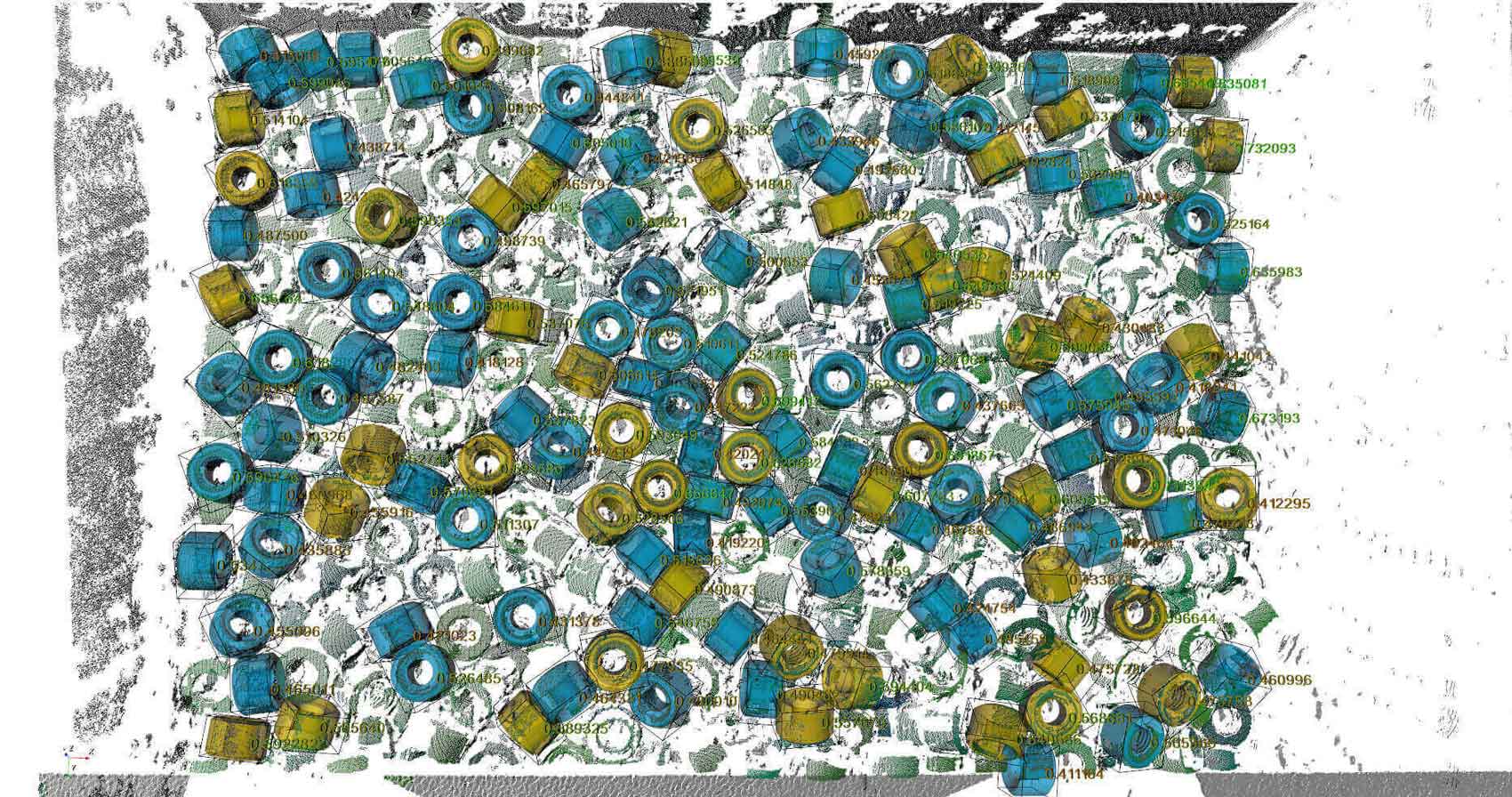
Bin Picking system is capable to process objects from a variety of materials that are randomly distributed. It is a system capable to process material randomly distributed in unorganized bins and feed it into the manufacturing production line. All done with a precise 3D vision system able to detect various types of objects and robotic intelligence systems, able to guide robots for safe object extraction.
PhoXi 3D Scanner family with a wide variety of scanning volumes and track record of being used in the harshest industrial environments.
CAD-based approach tested and approved by automotive customers with high demands for robustness and accuracy.
Unique robot control with a rapid calculation of movement trajectories, whilst maintaining the highest safety standards.
Database of hundreds of robotic models from leading robotic manufacturers.
According to Eurostat, the average labor cost in European Area is 30.6 EUR per hour. Considering a 24/7 operation of the machine loading which requires 4 full-time employees, this setup could reach up to 350 000 EUR.
The same value of an investment, which would return within a one year period can bring a automation of the entire system.











