PhoXi 3D Scanner 小号

数据表
| 参数 | 值 |
| 分辨率(3D点云) | Up to 3.2 M |
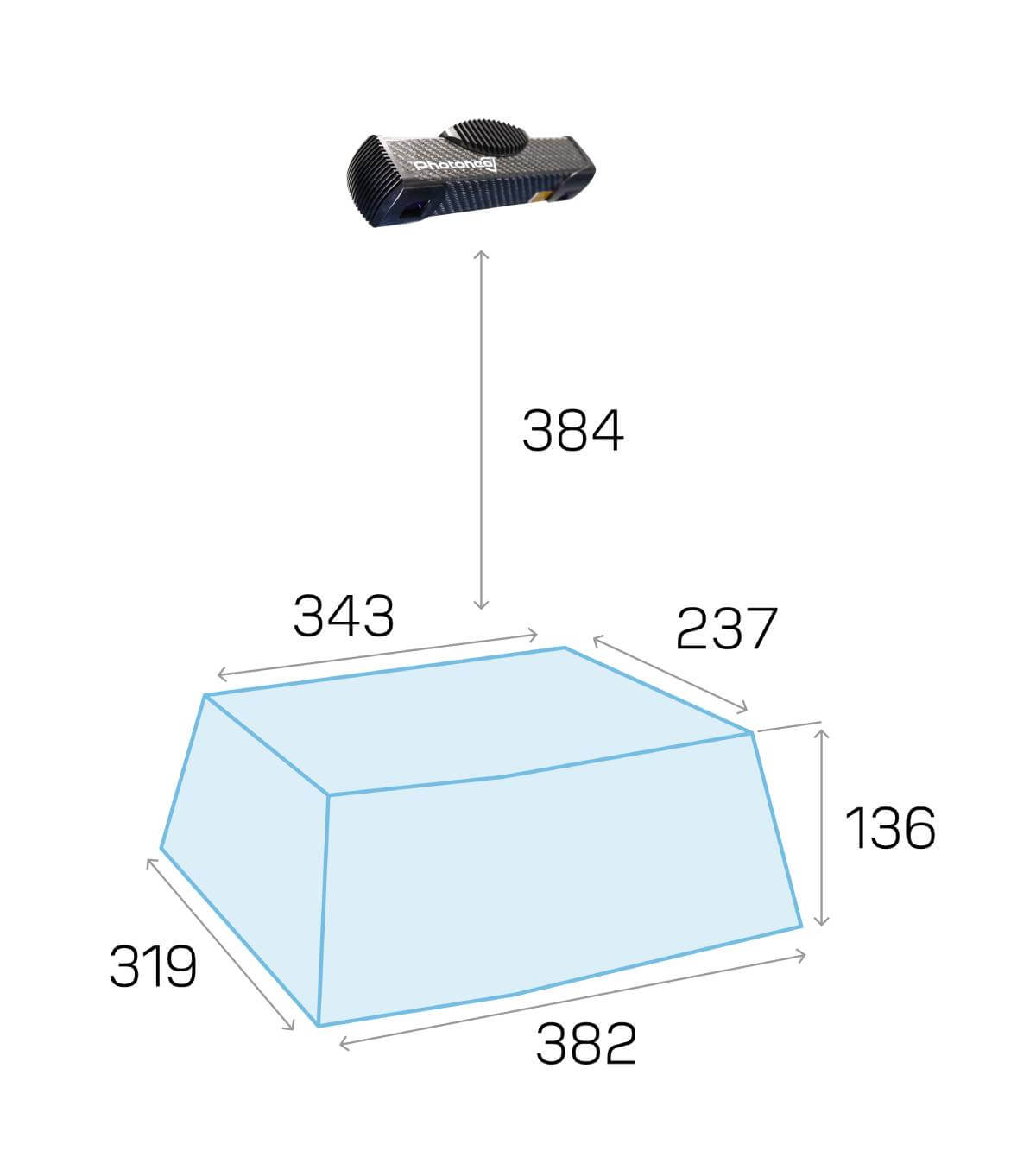
| 扫描范围 | 384 – 520 毫米 |
| 最佳扫描距离 | 442 毫米 |
| 最佳位置扫描区域 | 360 x 272毫米 |
| 点对点距离 | 0.174 毫米 |
| 校准精度 (1 σ) | 0.050 毫米 |
| 时间噪声 (1 σ) | 0.050 毫米 |
| 扫描时间 | 250 – 2250 毫秒 |
| 外形尺寸 | 77 x 68 x 296 毫米 |
| 基线 | 230 毫米 |
| 重量 | 900 克 |
| 3D 点吞吐量 | 16 Million points per second |
| 图形处理单元 | NVIDIA PascalTM Architecture GPU with 256 CUDA cores |
扫描范围