Bin Picking Studio
Die vielseitigste Roboter-Intelligenz-Software
Wie funktioniert es?
Auswahl des Roboters
Für Sie und Ihre Projekte haben wir die größte Datenbank von Robotern entwickelt. Wir unterstützen eine große Anzahl von Robotermodellen verschiedener Hersteller. Und wenn Sie einen Roboter haben, der nicht auf unserer Liste steht - nehmen Sie Kontakt mit uns auf, wir helfen Ihnen gerne weiter und integrieren ihn in unser Bin Picking Studio.

Laden Sie den Greifer hoch
Laden Sie das CAD-Modell Ihres Greifers hoch. Das Modell des Greifers dient zur Konfiguration der Werkzeugpunkte in der virtuellen Umgebung.

Laden Sie Ihr Objekt hoch
Alles, was Sie benötigen, um mit der Planung Ihrer Bin-Picking Greifstellen zu beginnen, ist ein CAD-Modell des zu kommissionierenden Produkts. Laden Sie es in das Bin Picking Studio hoch und beginnen Sie sofort mit der Arbeit in einer virtuellen Umgebung.
Set up gripping & tool points
Die Einrichtung des “Pick-and-Place”-Prozesses beginnt mit der Auswahl der Punkte, an denen der Greifer das Objekt erfasst. Bin Picking Studio bietet Ihnen auch bei dieser Aufgabe volle Unterstützung. Dank des einfachen visuellen Prozesses ist keine schwierige Mathematik erforderlich.
Laden Sie Ihre Umgebung hoch
In diesem Schritt sagen wir dem Bin Picking Studio, wo der Greifprozess stattfinden wird. Auch dies geschieht auf die einfachste Weise - durch Laden eines CAD-Modells der Umgebung Ihrer Roboterzelle. Unmittelbar nach dem Upload bietet Ihnen das Studio eine 3D-Visualisierung, die für die Arbeit zur Verfügung steht.
Einrichten der Teilelokalisierung
Bin Picking Studio implements a built-in engine for setting up an object localization algorithm. The algorithm based on the CAD matching approach was developed by Photoneo to suits the use for bin-picking with a focus on speed and robustness.
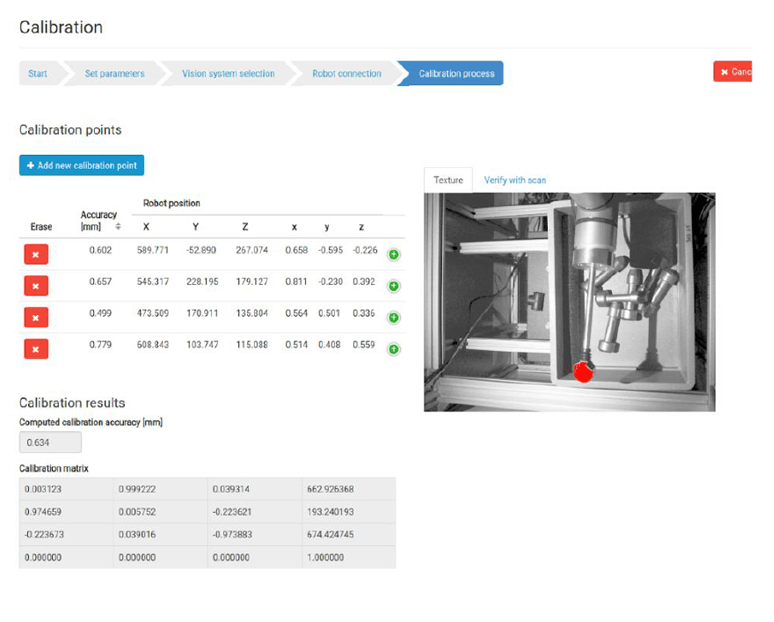
Roboter zur Kamerakalibrierung
Die Kalibrierung von Robotern war noch nie so einfach. Mit dem Bin Picking Studio von Photoneo benötigen Sie keine teuren und spezifischen Objekte oder speziell vorbereitete Kalibrierungsblätter mehr. Ein rundes Objekt in Form einer Kugel genügt. Kalibrieren und synchronisieren Sie Ihren Scanner und Roboter über das intuitiv geführte Programm. Sie erhalten sofort ein visuelles Feedback, das Sie während der gesamten Kalibrierung validieren und auswerten können.
Interaktives Debugging
Und schließlich ist es Zeit zum Greifen. Nutzen Sie die fortschrittlichsten Debugging-Tools innerhalb der virtuellen Umgebung. Diese ermöglichen es Ihnen zu sehen, wie gut die Lösung vorbereitet wurde.
Roboterintelligenz in 20 Minuten einrichten
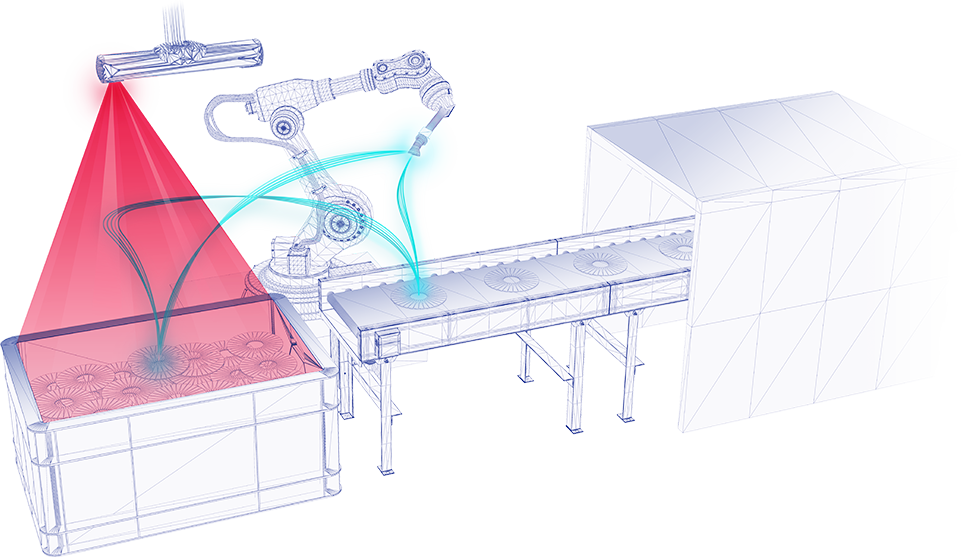
Eine Komplettlösung für Ihre “Pick-and-place”-Projekte

Bin Picking Studio is a combination of powerful 3D vision hardware represented by our line of PhoXi scanners & intelligent software for setup of picking. What you would search from 4 different providers with us you get in one package - All in one picking solution for your projects.
Sehen Sie sich das Webinar anPhoXi 3D Scanner
Überlegene 3D-Vision mit verschiedenen Größen und Scanbereichen sowie optimierten Funktionen für Bin Picking
Lokalisierung
Eigenentwickelte CAD-basierte Lokalisierungsalgorithmen mit intelligenten Funktionen für das Bin Picking wie intelligenter Speicher und Schnellscan
Bahnplanung
Bahnplanung optimiert für 6-Achsen-Manipulatoren mit der Möglichkeit, die Kollisionsprüfung für die Geschwindigkeitssteigerung in kollisionsfreien Umgebungen zu deaktivieren
Roboter-Schnittstelle
Generische Schnittstelle zu einem breiten Portfolio von Robotern, die eine Vielzahl von Befehlen unterstützen
Bin Picking Studio Vorteile
Kostenlose fachkundige technische Unterstützung
Ihre Zufriedenheit ist unser Ziel. Wir sind bereit, Ihre Fragen zu beantworten und Ihnen beim Einsatz in der Produktion zu helfen. Als Bonus erhalten Sie eine kostenlose Machbarkeitsstudie mit den Teilen, die Sie bearbeiten möchten. Unsere Ingenieure verfügen nachweislich über eine Vielzahl von erfolgreichen Systemeinsätzen und einschlägige Erfahrung in diesem Bereich. (Videos / Referenzen)
Große Datenbank von unterstützten Robotermodellen
Bin Picking Studio unterstützt bereits jetzt eine große Menge von Robotermodellen. Und bei denen, die es snoch nicht sind, verpflichten wir uns, jedes Robotermodell von den unterstützten Marken für Sie, Ihre Projekte und Ihren Komfort hinzuzufügen.
Entwerfen, visualisieren und konfigurieren
Verfolgen Sie Ihre Arbeit im visuellen Einrichtungsassistenten. Erhalten Sie sofort Feedback zu jedem Schritt innerhalb der Konfiguration und verkürzen Sie Ihre Designphase
Sammeln Sie mehrere Objekte
ie können bis zu 4 verschiedene Objekte aufnehmen und bis zu 4 Scanner innerhalb eines Bin-Picking-Szenarios verwenden.
Nie wieder bei 0 anfangen
Bin Picking Studio ermöglicht es Ihnen, frühere Lösungen wiederzuverwenden.
Schnelles Auffinden von Greifpunkten
Das Studio bietet eine speziell entwickelte Engine zur Auswahl von Greifpunkten in der virtuellen Umgebung direkt am Modell eines Objekts. Mit diesem Tool wird es nie ein Problem sein, den richtigen Greifpunkt zu finden.
Integrieren Sie das Bin Picking Studio mit diesen Roboter Marken sofort in Ihre Projekte.
Kontakt





Funktionen des Bin Picking Studio
Bahnplanung
Visionssysteme
Roboterdatenbank
Lösungen
Fernunterstützung
Scannergröße
Sichert eine kollisionsfreie Bewegung eines Manipulators. Entscheidend für komplexe Umgebungen
Zulässige Anzahl von Scannern, ausgewählten Objekten und Lokalisierungsprofilen
Verfügbare kinematische Modelle von Robotermanipulatoren
Anzahl der in einem System gespeicherten Bin Picking Lösungen
Zeitbudget reserviert beim Photoneo Support Team
PhoXi 3D Scanner-Familie besteht aus verschiedenen Größen, die unterschiedliche Scanvolumina darstellen
ausgestattete Unbegrenzt Voll Unbegrenzt 16 Stunden Alle
Kontakt
Kostenlose Machbarkeit & Demo
Sind Sie neugierig, ob Ihr Teil für die Bin-Kommissionierung geeignet ist? Vereinbaren Sie eine kostenlose Machbarkeitsstudie.
Anfrage sendenKostenloses Training
Bewerben Sie sich für eine kostenlose Schulung von Bin Picking Studio und werden Sie Master of Bin Picking.
Anfrage sendenBestellung / Leasing
Möchten Sie es selbst ausprobieren? Bestellen oder leasen Sie das Bin Picking Studio und beginnen Sie mit der Kommissionierung!
Anfrage senden