Bin Picking Studio
가장 다양한 용도로 활용할 수 있는 로봇 지능 소프트웨어
작동 방식
로봇 선택
귀하와 귀하의 프로젝트를 위해 가장 큰 로봇 데이터베이스를 개발했습니다. 당사는 다양한 브랜드에서 많은 수의 로봇 모델을 지원하고 있습니다. 목록에 원하는 로봇이 없는 경우 연락하시면 기꺼이 도와 드리겠습니다. 더불어 해당 로봇은 Bin Picking Studio에 통합됩니다.

그리퍼 업로드
그리핑 도구의 CAD 모델을 업로드합니다. 그리퍼 모델은 가상 환경에서 도구 포인트 구성에 사용됩니다.

개체 업로드
Bin Picking 그리핑 포인트 계획을 시작할 때는 선택하려는 제품의 CAD 모델만 있으면 됩니다. Bin Picking Studio에 업로드하면 가상 환경에서 즉시 작업을 시작할 수 있습니다.
Set up gripping & tool points
Bin Picking 설정은 그리퍼가 물체를 잡는 위치와 방법을 선택하는 것으로 시작됩니다. Bin Picking Studio는 이 작업도 완벽하게 지원합니다. 간단한 시각적 공정 덕분에 복잡한 수학이 필요하지 않습니다.
환경 로드
이 단계에서는 Bin Picking Studio에 피킹이 이루어지는 위치를 알려줍니다. 피킹 셀의 CAD 모델을 로드하여 가능한 가장 쉬운 방법으로 작업을 다시 수행합니다. 업로드 직후 Studio는 작업에 사용할 수 있는 3D 시각화 정보를 제공합니다.
부품 위치 파악 설정
Bin Picking Studio implements a built-in engine for setting up an object localization algorithm. The algorithm based on the CAD matching approach was developed by Photoneo to suits the use for bin-picking with a focus on speed and robustness.
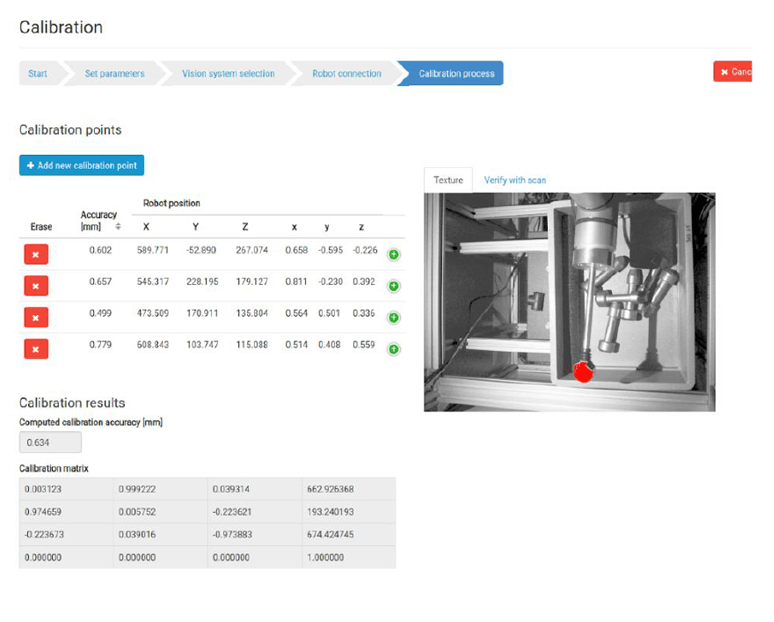
카메라에 대한 로봇 보정
로봇 보정이 그 어느 때보다 쉬워졌습니다. Photoneo의 Bin Picking Studio만 있으면 비싸고 특정한 물체나 특별하게 준비해야 하는 보정 시트가 필요하지 않습니다. 구 모양의 원형 물체 하나만 있으면 됩니다. 직관적인 안내 프로그램에 따라 스캐너와 로봇을 보정하고 동기화합니다. 보정 전체에 걸쳐 검증하고 평가할 수 있는 시각적 피드백을 즉시 받습니다.
대화형 디버깅
And finally, it is time to pick. Utilize the ultimate advance debugging tools within the virtual environment. These will allow you to see how well was the solution prepared.
20분 만에 로봇 지능 설정
피킹 프로젝트를 위한 완벽한 솔루션

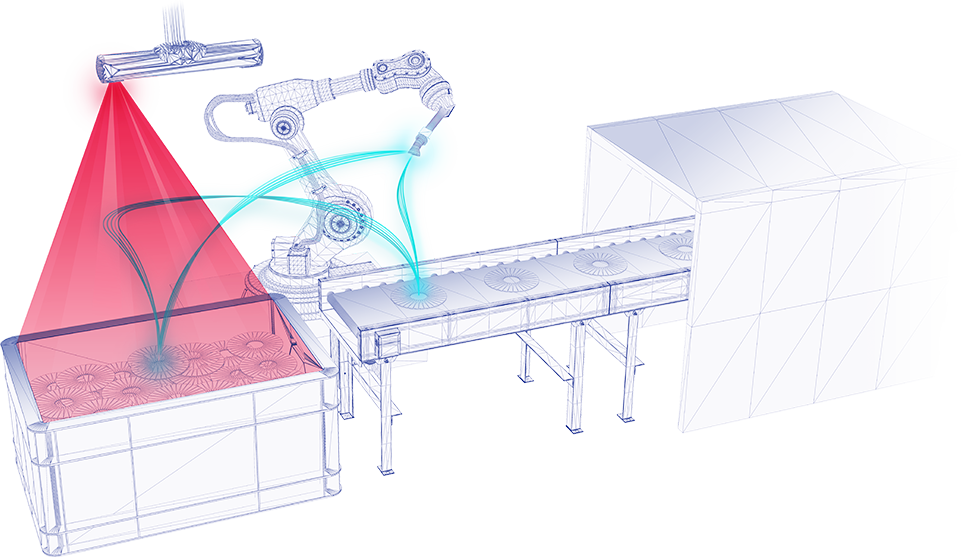
Bin Picking Studio is a combination of powerful 3D vision hardware represented by our line of PhoXi scanners & intelligent software for setup of picking. What you would search from 4 different providers with us you get in one package - All in one picking solution for your projects.
웨비나 보기PhoXi 3D 스캐너
Bin Picking에 최적화된 기능뿐만 아니라 다양한 크기 및 스캐닝 영역에 대응하는 우수한 3D 비전
Localization
스마트 메모리 및 빠른 스캔과 같이 Bin Picking을 위한 스마트 기능을 갖춘 자체 개발 CAD 기반 위치 파악 알고리즘
경로 계획
충돌 없는 환경에서 속도를 향상시키기 위해 충돌 검사를 비활성화하는 옵션이 포함되어 있으며 6축 조정기에 최적화된 경로 계획
로봇 인터페이스
다양한 명령을 지원하는 광범위한 로봇 포트폴리오에 대한 일반 인터페이스
Bin Picking Studio 이점
무료 전문가 기술 지원
귀하의 행복이 당사의 목표입니다. 귀하의 질문에 답변하고 배포를 지원할 준비가 되었습니다. 보너스로 취급한 부품에 대한 타당성 검사를 무료로 받을 수 있습니다. 당사 엔지니어는 성공적인 시스템 배포와 관련 경험을 통해 충분하게 지원할 수 있습니다.
지원되는 로봇 모델에 대한 대규모 데이터베이스
Bin Picking Studio는 현재 로봇 모델에 대한 대규모 데이터베이스를 지원합니다. 그리고 지원하지 못하는 경우 지원 브랜드의 로봇 모델을 귀하, 귀하의 프로젝트 및 편의를 위해 추가하도록 최선을 다합니다.
설계, 시각화 및 구성
시각적 설정 마법사로 작업을 추적합니다. 구성 내에서 각 단계에 대한 피드백을 즉시 받아 설계 단계를 줄일 수 있습니다.
여러 물체 피킹
하나의 Bin Picking 시나리오 내에서 최대 4개의 다른 물체를 선택해 스캐너를 4개까지 사용할 수 있습니다.
0에서 다시 시작하지 않음
Bin Picking Studio가 있으면 이전 솔루션을 재사용할 수 있습니다.
그리핑 포인트 즉시 찾기
Studio는 물체 모델의 가상 환경에서 그리핑 포인트를 직접 선택하기 위해 특별히 설계된 엔진을 제공합니다. 이 도구를 사용하면 아무 문제 없이 잡을 올바른 포인트를 찾을 수 있습니다.
이러한 로봇 브랜드를 사용하여 Bin Picking Studio를 프로젝트에 즉시 통합합니다.
문의하기





Bin Picking Studio 기능
경로 계획
비전 시스템
로봇 데이터베이스
솔루션
원격 지원
스캐너 크기
조정기의 충돌 없는 움직임을 보호합니다. 복잡한 환경에 중요합니다.
허용된 스캐너 수, 선택된 물체 및 위치 파악 프로필
로봇 조정기에 사용 가능한 운동학적 모델
한 시스템에 저장된 Bin Picking 솔루션 수
Photoneo 지원 팀에 예약된 시간 예산
PhoXi 3D 스캐너는 여러 스캐닝 볼륨을 나타내는 다양한 크기로 구성됩니다.
featured 무제한 전체 무제한 16시간 모두