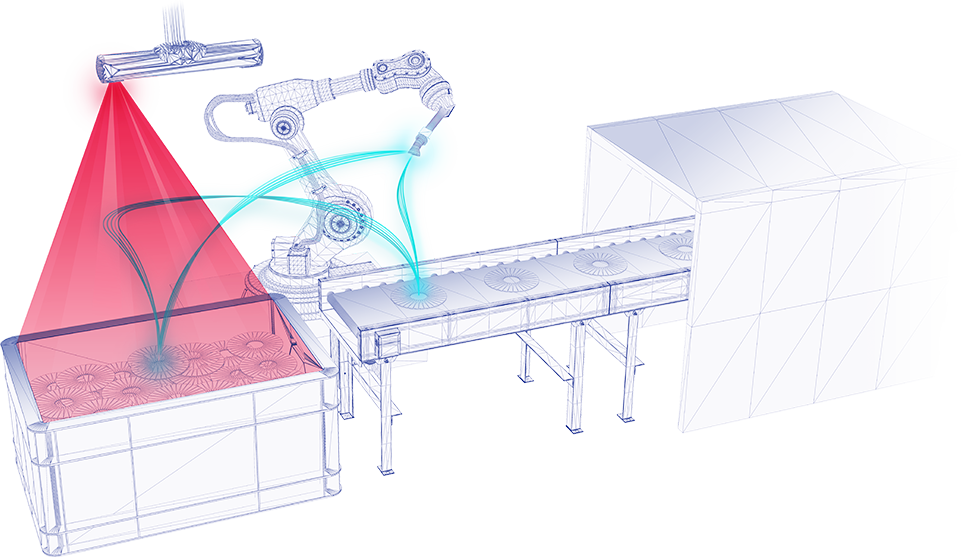
自动抓取系统
最通用的机器人智能软件
它是如何工作的
选择机器人
为了您和您的项目,我们开发了最大的机器人数据库。我们支持来自不同品牌的大量机器人模型。如果您的机器人不在我们的列表中,请与我们联系,我们将很乐意为您提供帮助,并将其整合到我们的Bin Picking中。

上传抓取器
上传您的抓取工具的CAD模型。抓取工具的模型用于虚拟环境中的工具点配置。

上传你的抓取对象
要开始规划您的bin picking选抓取点,您所需要的只是一个您想要拣选的产品的CAD模型。将其上传到Bin Picking Studio中,并立即在虚拟环境中开始工作。
Set up gripping & tool points
Bin Picking的设置从选择抓取器抓取物体的位置和方式开始。在这个任务中,Bin Picking Studio也为您提供了全面的支持。由于简单的可视化过程,你不需要复杂的数学计算。
加载环境结构
在这一步中,我们将让Bin Picking知道拣选的位置。这也是以最简单的方式完成的--通过加载拣选单元的CAD模型。上传后,工作室会立即为您提供一个可供工作的3D可视化模型。
设置您的部件localization
Bin Picking Studio implements a built-in engine for setting up an object localization algorithm. The algorithm based on the CAD matching approach was developed by Photoneo to suits the use for bin-picking with a focus on speed and robustness.
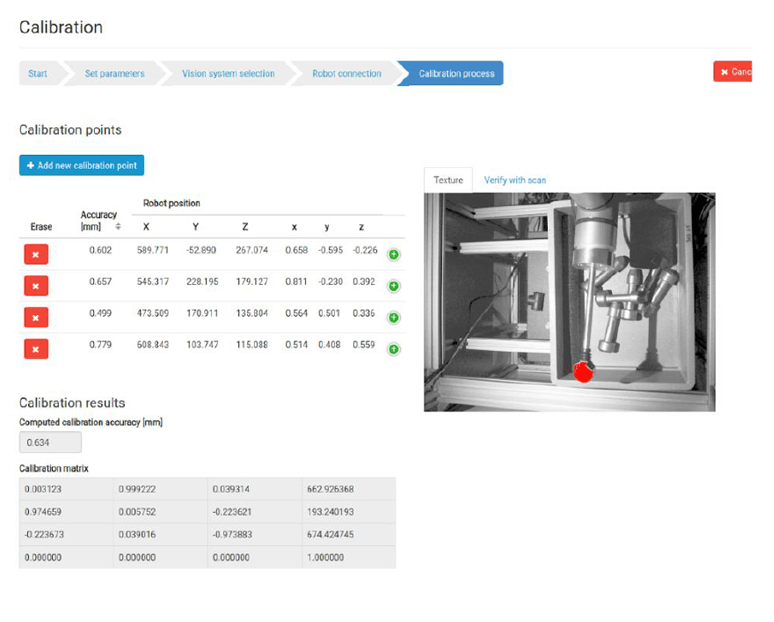
机器人对相机校准
机器人校准从未如此简单。有了Photoneo的Bin Picking Studio,您不再需要昂贵的特定物体或特别准备的校准表。一个球体形状的圆形物体就足够了。通过直观的引导程序,对扫描仪和机器人进行校准和同步。您将立即收到视觉反馈,您能够在整个校准过程中进行验证和评估。
交互式调试
最后,就是挑选的时候了。利用虚拟环境内的终极高级调试工具。这些可以让你看到解决方案的准备情况。
在 20 分钟内设置机器人智能
为您的采摘项目提供完整的解决方案

Bin Picking Studio is a combination of powerful 3D vision hardware represented by our line of PhoXi scanners & intelligent software for setup of picking. What you would search from 4 different providers with us you get in one package - All in one picking solution for your projects.
查看网络研讨会PhoXi 3D扫描仪
具有各种尺寸和扫描范围的卓越3D视觉,以及优化的无序抓取功能。
定位
自主开发的基于CAD的定位算法,具有智能记忆和快速扫描等智能功能。
路径规划
为6轴机械手优化的路径规划,可在无碰撞环境中禁用碰撞检查以提高速度。
机器人接口
支持多种指令的机器人组合的通用接口。
Bin Picking Studio的好处
免费的专家技术支持
您的幸福是我们的目标。我们随时准备回答您的问题并帮助您进行部署。作为奖励,您将得到一个免费的可行性研究,您想处理的部分。我们的工程师拥有成功的系统部署和相关领域的经验证明。
支持机器人模型的大型数据库
Bin Picking Studio目前支持大量的机器人模型数据库。而对于那些不支持的,我们承诺从支持的品牌中添加任何机器人模型,以方便您和您的项目。
设计、可视化和配置
在可视化设置向导中跟踪您的工作。立即获得配置中每一步的反馈,减少您的设计阶段。
选择多个对象
您能够在一个bin-picking方案中最多拣选4个不同的对象,并使用4个相机。
再也不用从零开始了
Bin Picking Studio允许您重复使用以前的解决方案。
瞬间找到抓点
Studio提供了一个专门设计的引擎,用于在虚拟环境中直接在对象的模型上选择抓取点。有了这个工具,找到合适的抓取点将永远不是问题。
通过这些机器人品牌,可以立即将Bin Picking Studio整合到您的项目中。
联系我们





Bin Picking Studio的特点
路径设计
视觉系统
机器人数据库
解决方案
远程支持
扫描仪尺寸
确保机械手的无碰撞运动。对于复杂环境至关重要
允许的扫描仪、拾取的对象和本地化配置文件数量
可用的机械手运动学模型
存储在一个系统中的自动抓取零件解决方案数量
Photoneo支持团队的时间预算
PhoXi 3D相机包括多种型号,不同型号有不同扫描量
功能齐全 不限量 全部范围 不限量 16小时 所有