Robotic picking of croissants
Partner:
IMR – Irish Manufacturing Research
Challenge:
Bin picking of randomly oriented parts is of great interest to manufacturers as automation of these processes can save a lot of costs and space. The market offers a large number of bin picking solutions but many of them struggle with recognizing and identifying transparent, deformable, variable , and reflective objects that may even be piled, entangled, and jumbled up.
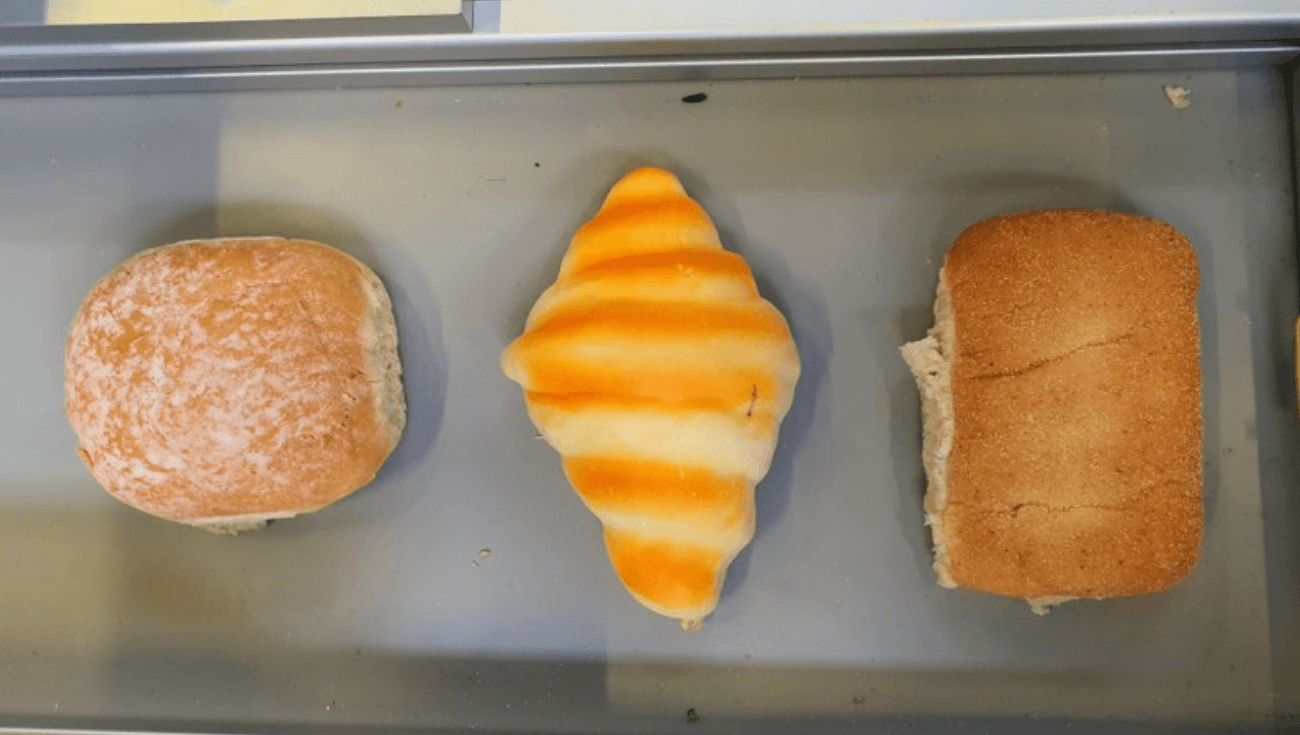
The Irish Manufacturing Research built a bin picking cell for the picking of 3 different types of randomly oriented bread products.
This project presented several technical challenges:
- Identification and picking of objects of non-symmetrical and complex shapes
- Random orientation of the objects
- Picking of 3 different types of objects
- Achieving optimal process speed
Solution:
Bin Picking Studio + PhoXi 3D Scanner
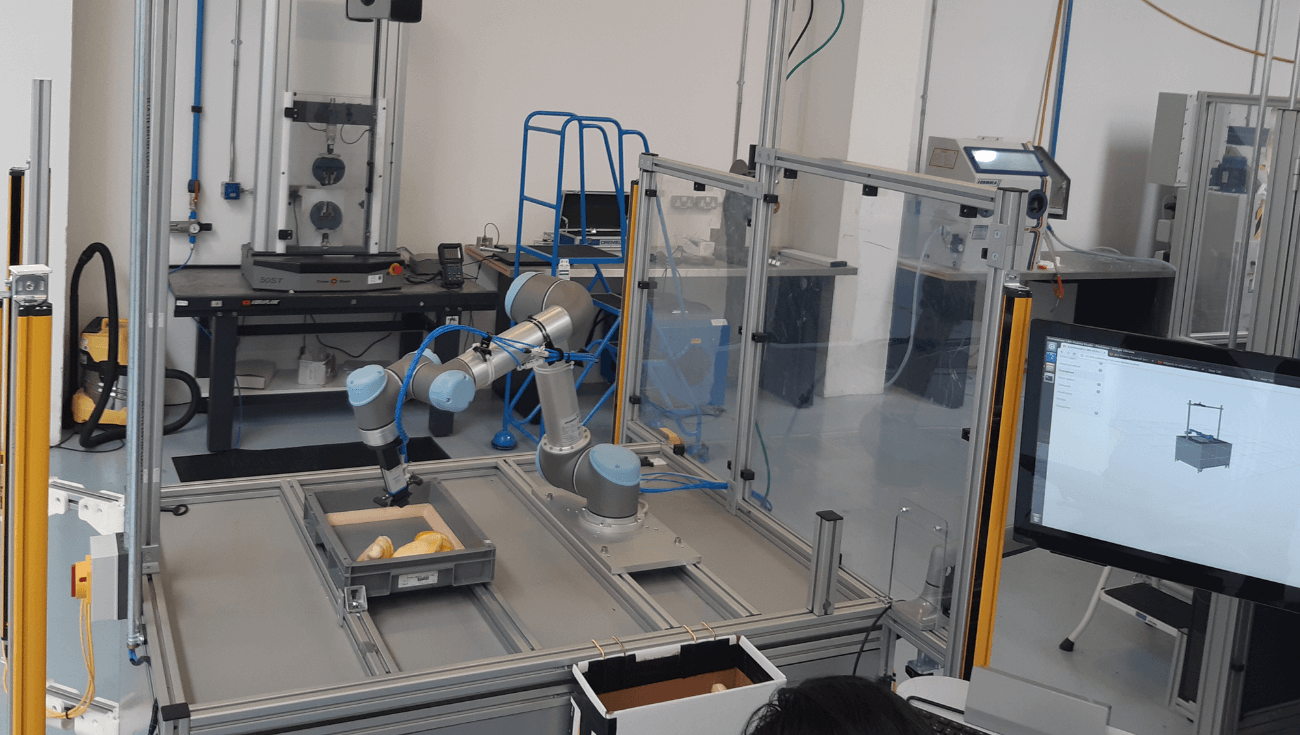
The solution comprises a bin picking cell with Photoneo robotic intelligence software for bin picking – the Bin Picking Studio, a PhoXi 3D Scanner, and a UR 5 robot. The supplier of Photoneo technology in the UK is Multipix Imaging.
Before implementation, the following setup and configuration requirements needed to be met:
Pre-planning:
- Defining a suitable end-of-arm tooling design
- Mounting an EOAT gripper and testing its operation on the robot
- Ensuring correct safety requirements (Collaborative mode or Industrial mode)
- Having CAD models (in the STL file format) of:
- The product to be picked
- The EOAT gripper
- The cell layout
- Having the required software files of the UR5 robot for integration with the Bin Picking Studio
- Having the required network cables for a physical connection between Bin Picking Studio, UR5, and PhoXi 3D Scanner
- Having an HDMI cable for connection between Bin Picking Studio hardware and the monitor screen
Setup:
After all the above requirements had been met, the next implementation steps were:
- Building the cell and integrating hardware
- Integrating Bin Picking studio hardware and software
- Planning gripper grasping, including all potential grasping orientations and picking points
- Calibration of robot vision and the end-of-arm tooling
- Setting parameters
- Optimization of layout, path planning, and robot parameters
- Repeatability testing
The system enables repeatable picking and emptying of random bins filled with 3 different bread products of complex shapes at a picking rate of 6ppm. If the products had a symmetrical shape, the processing speed would be even faster.
The system enables an easy changeover between different products.
Discussion:
This project provides IMR partners and customers insights into the requirements and capabilities of a typical bin picking solution. IMR has invested in a commercial bin picking solution that Irish manufacturers and IMR partners can avail of.
The system can be further optimized by:
- Setting the robot speed to maximum
- Restricting the robot’s joint motions for shorter trajectories
- Using smart memory and fast scanning option
- Optimizing localization parameters available in the system
- Using grasp invariance feature that allows multiple possible grasp points on the product
Would you like to know more about Photoneo technology and how it can benefit your applications?