Photoneo 3D Meshing
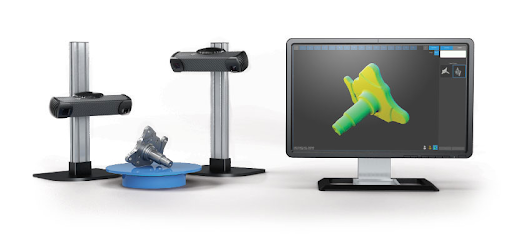
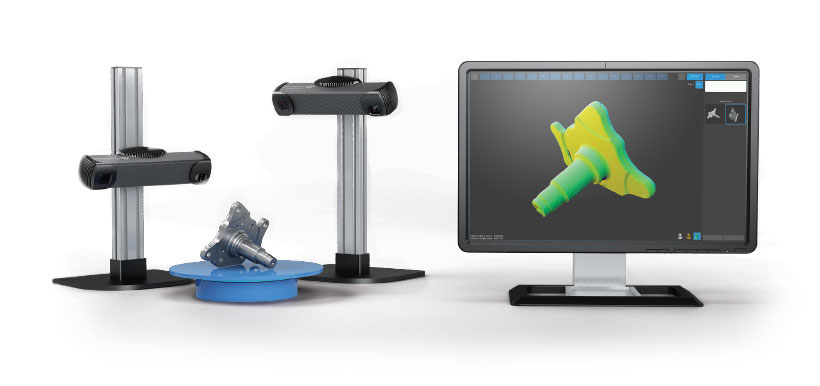
Photoneo 3D Meshing is a versatile software solution designed for fast and precise 3D model creation from multiple 3D scans or a continuous stream of 3D data from Photoneo 3D Sensors. It aims at advanced 3D data acquisition suitable for a diverse range of applications such as robotic guidance, quality inspection, and reverse engineering. It is provided in the form of two separate libraries and GUIs.
3D Model creation
Combining multiple scans in the same coordinate space allows you to create digital versions of real-live objects from detailed composite point clouds or to convert the point clouds into meshes for further processing.
Objects in motion
Combining multiple sensors and objects in motion allows you to digitize massive objects that could otherwise not be captured. Creating a real time data flow enables immediate conformity, damage control, as well as tracking objects in space.
Large object scanning
Combining robotic arms, Photoneo Sensors and 3D Meshing provide a flexible solution for digitizing large and complex objects on the fly, enabling a full automation and digital object processing. The combination of a 3D point cloud with color and texture data opens up unprecedented opportunities for 3D image processing.
Easy and Fast deployment
Combining Photoneo 3D meshing with MotionCam-3D Color allows a plug and play experience that delivers highly color-textured composite point clouds or meshed 3D models within minutes. High flexibility allows it to be deployed in any situation, from handheld scanning up to industrial environments.

Integrate Photoneo 3D Meshing to your projects .
Consult your case| 3D Meshing (Standard Library) |
3D Instant Meshing (Instant Library ) |
|||||
| Purpose | Creation of high-quality 3D models from scans taken from multiple perspectives On-the-fly 3D model creation using a stream of 3D data from MotionCam-3D (Color) | On-the-fly 3D model creation using a stream of 3D data from MotionCam-3D (Color) | ||||
| Supported Photoneo 3D Sensors | PhoXi 3D Scanner, MotionCam-3D (Color) | MotionCam-3D (Color) | ||||
| Source of data | Set of 3D scans taken from different perspectives | 3D point cloud stream from MotionCam-3D | ||||
| 3D point cloud stream from MotionCam-3D | Tracking / Scan alignment The set of 3D scans needs to be in the same global coordinate system. Calibration is required: - for each scan using a marker pattern - only at the initialization when using a rotary table (with an encoder for positioning) Automatic tracking (camera movement estimation) based on 3D features (support for inputting the camera position, e.g. hand-eye use case). It allows an automatic alignment of data, no global coordinate system is required | Automatic tracking (camera movement estimation) based on 3D features (support for inputting the camera position, e.g. hand-eye use case). It allows an automatic alignment of data, no global coordinate system is required | ||||
| Pipeline | Sequential with the full control of the individual steps | Instant model creation | ||||
| User Manual | Link | Link | ||||
|
|
|||||