
Boosting Automotive Throughput with Multi-Perspective 3D Vision & Dynamic Bin Picking
Automation in car manufacturing is booming, but can it keep up? Surging demand, rising costs, and labor gaps are pushing carmakers to their limits. Traditional automation is straining, unable to handle today’s complex production. However, thanks to novel vision-guidance, new solutions are offering a path forward.
Costs, Labor, and Demand Squeeze Industry
Escalating material and labor costs, compounded by critical workforce shortages constrain the growth in automotive industry. Manufacturing, in particular, faces acute labor gaps, hindering production scalability. Industry reports confirm the feedback from our automotive clients: the primary obstacle for manufacturers is the difficulty in attracting and retaining skilled labor.
To address these challenges, Vision-Guided Robotics (VGR), including bin-picking operations, is gaining traction across all phases of automotive manufacturing—from stamping and body shops to general assembly, drivetrain production, and inspection. VGR offers a solution to reduce manual labor reliance and enhance efficiency.
Bin-Picking: An Answer to Automakers’ Challenges
For car manufacturers facing today’s production hurdles, automated bin-picking is becoming a go-to solution. It’s a solid way to boost both your production capacity and your operational efficiency. Industry analysts project a remarkable quadrupling of the bin-picking market within the next four years.
What’s really pushing companies to use bin-picking? It changes how parts are handled, with precise accuracy and consistency.
💡Want more insights about the future of automotive industry? Watch Tomas’ webinar today!
Beyond enhanced accuracy, automated dynamic assembly significantly boosts production throughput. Robots equipped with cutting-edge 3D vision technology operate tirelessly, eliminating the limitations of human fatigue. Furthermore, the integration of vision-guided systems eliminates the need for bulky, space-consuming jigs and feeders, optimizing floor space.
The tangible benefits of bin-picking are particularly evident in three critical automotive manufacturing applications:
- Components Handing & Bin Picking Automation: Bin-picking systems are indispensable for the efficient sorting and handling of a diverse range of components, including brackets, fasteners, body panels, brake disks, bearings, bushings, and shafts. The inherent precision of robotic systems minimizes handling errors, ensuring consistent and accurate sorting. Advanced 3D vision capabilities enable these robots to adapt to varying component shapes and sizes, eliminating the need for frequent and costly retooling.
- Machine Loading: Robotic bin-picking systems are widely deployed in machine-loading tasks, particularly in feeding parts into stamping presses and CNC machines. These systems offer exceptional flexibility in handling complex geometries and varying sizes without requiring precise part positioning. The ability to manage heavy or irregularly shaped components, such as gears and engine blocks, is crucial for maintaining a seamless production flow.
What Hurdles to Overcome?
However, the practical implementation of bin-picking is not without its challenges. Traditional bin-picking solutions often struggle with:
- Accessing Hard-to-Reach Items: Retrieving components that are deeply nested, entangled, or located in the corners of bins, especially as the bin empties, presents a significant challenge. To make sure the robot can get those tough-to-reach parts without messing up the whole system, we need some clever planning and gripping techniques. That’s where advanced software and flexible grippers come in – they’re essential for handling those complicated picks.
- Collision Avoidance: The risk of collisions between the gripper and remaining components in the bin is a critical concern. Precise navigation is essential to prevent damage and maintain operational integrity. Achieving this level of precision requires meticulous hardware design, including advanced 3D sensors and grippers, combined with robust control algorithms that can accurately predict and avoid potential collisions. Real-time feedback and dynamic path adjustments are essential for ensuring safe and efficient operation.
A Multi-Perspective 3D Scanning

Modern bin-picking solutions are overcoming traditional limitations by integrating advanced technologies, including sophisticated path-planning algorithms and real-time obstacle avoidance systems. These innovations empower system integrators to dynamically adapt robotic picking strategies, significantly minimizing collision risks and maximizing item retrieval success rates.
However, the efficacy of these systems hinges on robust vision technologies that can address a fundamental challenge: reliable and accurate object localization. Traditional single-camera approaches often struggle with the complex geometries and material properties encountered in automotive components, such as thin, reflective, metallic, or irregularly shaped objects.
These limitations lead to missed parts, increased cycle times, and compromised efficiency due to the inherent inability of a single perspective to capture comprehensive scene data.
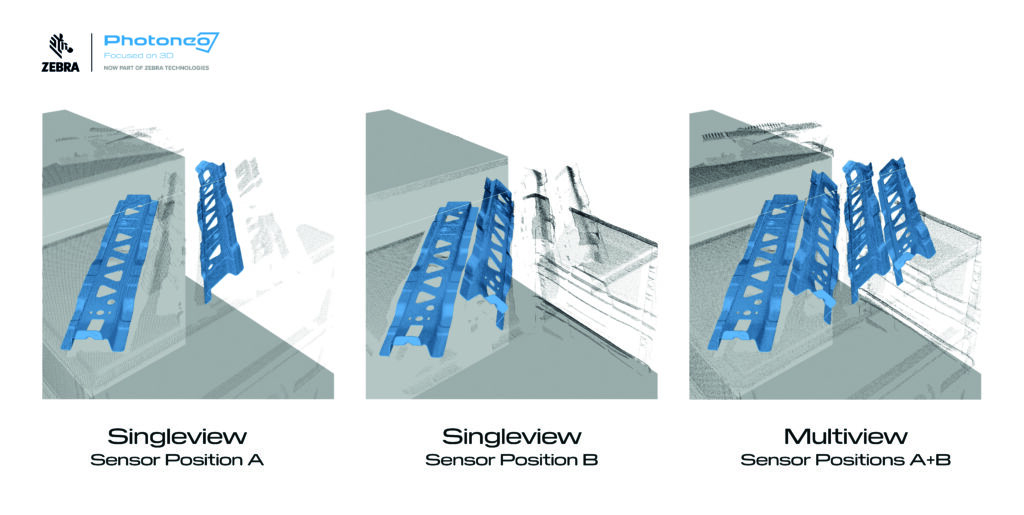
To address this, advanced bin-picking systems are adopting multi-perspective scanning strategies. This approach significantly enhances object visibility and reduces occlusions by combining data from multiple viewpoints. Two primary methods are employed:
- Multi-Static Sensor Configuration: This configuration utilizes a primary sensor calibrated to the robot, supplemented by secondary sensors calibrated relative to the primary sensor. Sequential scanning from each sensor provides a comprehensive scene representation, capturing details that would be obscured from a single perspective. This method is particularly effective for static bin configurations and predictable object arrangements.
- Dynamic 3D Scanning with MotionCam-3D: This approach leverages a 3D sensor, such as the MotionCam-3D, mounted in a hand-eye configuration on the robotic arm. This enables dynamic 3D scanning as the robot moves, providing virtually unlimited scanning angles. The continuous stream of 3D data is seamlessly integrated into a unified, real-time scene representation. This method excels at localizing challenging objects, including thin metal sheets (C- or L-shaped), shiny or reflective surfaces, bins with compartments, and self-occluded objects.
Benefits of 3D Scanning from Multiple Angles
The benefits of multi-perspective scanning are significant:
- Enhanced Object Localization: By combining data from multiple viewpoints, the system eliminates blind spots and ensures accurate localization of complex shapes and materials.
- Improved Detail Quality: Multiple scans capture fine details that would be lost in a single-perspective approach.
- Reduced Occlusions: Combining views significantly minimizes occlusions, ensuring comprehensive visibility of hidden features.
- Accelerated Cycle Times: Accurate and reliable localization reduces errors and speeds up the picking process.
- Adaptability to Complex Scenarios: This approach is particularly effective in bins with compartments or self-occluding parts, where traditional methods struggle.
Multi-perspective scanning configurations are tailored to specific industrial needs. For instance, multiple static sensors can be employed for fixed bin arrangements, while a hand-eye configuration with a dynamic 3D sensor provides maximum flexibility for complex and variable scenarios.
By integrating multi-perspective scanning with advanced path-planning algorithms, robots can effectively navigate obstacles, identify optimal gripping points, and efficiently empty bins, regardless of object arrangement.
Deeper Dive into Automotive Automation
Do you want to automate your car-making production line, from press shop to general assembly? Or are you considering enhancing your automotive automation from fixed coordinates to flexibility of robotic 3D vision? Download our free e-book to find out all you need to get started!
👇GO TO DOWNLOAD👇



