Picking from several bins: Advantages of a dedicated scanner per bin
Do you need to pick parts from several bins? Then you probably grapple with the dilemma of how many scanners you should use and where to mount them. We talked to Jozef Veres, Sales Director of Automation at Photoneo, and Patrik Bakyta, Product Specialist for Bin Picking Solutions, to walk you through the options you have and suggest a solution we consider to be best suited for this type of bin picking application.
Robotic picking of parts from a bin is a very common and rather straightforward application: You need a 3D scanner to make a scan of the contents of the container. Based on the 3D data, bin picking software decides which part to pick next, sends the information to the robot, and the robot navigates to the part to pick it.
This task becomes more complex when you need to pick parts from two bins. Here, you have three options:
1.) You can use one scanner for two bins: In this case, the scanner needs to be attached to a moving linear unit positioned above the bins so that the scanner can move from one bin to another. While the robot picks from one bin, the scanner moves to the other bin and makes a scan. An alternative is to use a bigger scanner that is fixed mounted above the bins. However, you need to count with a high amount of shadows, lower resolution due to a higher scanning volume, and limitations defined by the floorplan possibilities.
2.) You can have a hand-eye setup with the scanner mounted to the robotic arm. This way, the scanner will move with the robotic arm from one bin to another.
3.) You can have a dedicated scanner for each bin. In this case, each scanner is positioned above a separate bin.
Now, pushing aside the unique requirements and objectives of every single project, we can agree that every customer is looking to achieve the highest possible level of overall efficiency.
Other important factors to consider include investment and maintenance costs, the easiness of integration and installation, production continuity, scanning accuracy, and ROI, of course.
So, which of the three setups listed above is best when picking from several bins? While each offers a number of unique benefits, the third option with having a dedicated scanner per bin offers numerous advantages that outweigh the other two alternatives. We are going to look at them now so let’s continue reading.
The advantages of having a dedicated scanner per bin
One scanner per bin vs. a linear unit
A linear unit is definitely a nice solution for picking from two bins – the scanner attached to a moving linear actuator makes a scan of one bin, the robot receives the data, and while it picks the part, the scanner moves along the linear axis to the other bin to scan its contents. This way, the robot does not need to stop to acquire 3D data from the second container, which saves a lot of time.
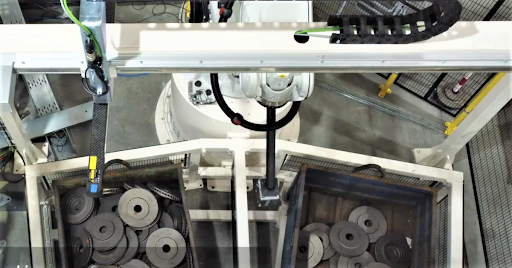
Bin picking of casting brake discs from two bins using a scanner moving on a linear unit.
However, having a dedicated scanner per bin is much more efficient, cheaper, easier to install, and also more advantageous in terms of ROI.
Production continuity
A dedicated scanner per bin ensures continuous operation, which is undoubtedly the dream of every manufacturer. If one bin cell stops working because of an error, the operation does not need to be interrupted as the line does not depend on one single hardware.
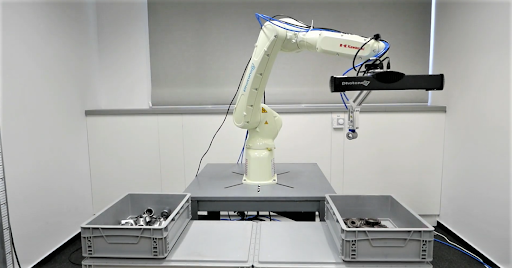
Bin picking from several bins with dedicated vision systems.
This increases the overall equipment effectiveness – i.e. the overall manufacturing time that is really productive, compared to the full potential of the operation.
Costs
Having only one scanner for two bins has also other disadvantages – the linear unit is more expensive than two scanners and it also requires higher investment costs. These include expenses for the linear unit motor, cabling, external control, PLC inputs, and other integration costs that are generally not included in the unit price. And of course, the more components you have, the higher the risk of a malfunction and related maintenance costs.
Installation
The integration and installation of a linear unit are more difficult and require a stiff construction to ensure high scanning accuracy, which also leads to higher costs. This is especially true for applications with the linear unit mounted high above the bins, let’s say 4 meters. Such setups require a truly robust construction.
Another disadvantage of linear units is that they only work if the bins are positioned in line. When they are placed perpendicular or at an angle to each other, the setup does not work.
Calibration and scanning parameters
If you have two scanners, each dedicated to one bin, you can set unique scanning parameters for each scanner. (Note: If you use Bin Picking Studio 1.7.0 and future versions, you can define a unique scanning profile for each vision system. If you have multiple vision systems that use the same scanner, the change of scanning profile is instant).
In addition, because the calibration is static, there is a minimum chance of calibration deviation. In contrast to this, the calibration of a linear unit is much more difficult due to the imprecise positioning of the scanner. Even a deviation of a few millimeters in one axis can lead to significant offsets.
Scalability
Two scanners with two separate cables also offer better scalability and a lean, straight-to-the-point operation.
Now, let’s have a look at the advantages of using a dedicated scanner per bin over hand-eye bin picking from two bins.
One scanner per bin vs. hand-eye operation
Calibration and scanning parameters
As previously stated, having two scanners for two bins allows you to set different scanning parameters for each vision system. This is a great advantage also when we compare one scanner per bin with a hand-eye setup. If you have two bins and one scanner attached to the robotic arm, you need to set different scanning parameters for each bin. (Note: This argument does not apply if you have Bin Picking Studio 1.7.0 and future versions).
Bin picking from two bins using hand-eye coordination.
Each setup also requires a different calibration method. While the hand-eye approach uses a special marker pattern, the calibration of dedicated scanners requires a calibration ball.
Cycle time
Another point of difference between the two approaches is cycle time. With dedicated scanners per bin, the robot does not need to stop so you can achieve the best possible cycle time limited only by the speed of the robot. With the hand-eye approach, the process takes longer – first, the robot stops to allow scan acquisition (unless you use MotionCam-3D for scanning in motion, which significantly lowers the amount of time the robot needs to stay still), then the scanner makes a scan, the data is then processed and sent to the robot, and only after that can the robot pick the chosen part.
Because of this, a dedicated scanner per bin provides a huge advantage if you want to reach fast cycle times. In contrast, a hand-eye approach is a good option for applications where picking speed and cycle times do not play a significant role.
Scanning area and collision zone
If you use a dedicated scanner per bin, you can cover an enormously large scanning area. In addition, the scanner is located outside the collision zone, which minimizes the risk of hardware damage.
In contrast, the hand-eye approach cannot cover such a large scanning area. Because the scanner moves with the robotic arm, the scanning distance is limited by the robot’s positioning in a limited space and cycle time.
Another disadvantage of hand-eye coordination is that the scanner attached to the robotic arm limits the robot’s maneuverability and also presents an additional collision zone so the risk of collision is higher. This may happen in case the scanner cables get accidentally in the robot’s way or if a robotic programmer programs the robot’s trajectory incorrectly. Nonetheless, using a small scanner mounted to the robotic arm may be very effective for the scanning of small details on large objects.
In the end, it is your choice which setup you choose for your bin picking application. Whatever alternative you go for, the most important thing is to consider thoroughly your project requirements and precisely calculate the overall costs as well as the integration and maintenance effort that may come with your chosen solution.
We will be happy to help you with your bin picking project – try out our robotic intelligence tool for advanced bin picking – the Bin Picking Studio 1.7.0, or our 3D picking solution for extremely fast picking of oriented and semi-oriented parts in collision-free environments – the new Locator Studio.
Both solutions come as a package, including localization software and a PhoXi 3D Scanner of your choice.