How pick and place robots work
It is common nowadays to see various types of robots in manufacturing environments as robots ease a whole range of manufacturing processes for countless businesses.
One specific area of robotics is pick and place robots. Their task is to pick objects from one area and place them in another predefined location. This significantly speeds up the manufacturing processes of products.
In this blog article, we will discuss how pick and place robots work.
What are pick and place robots?
Pick and place robots are one of the most common types of industrial robots that can be found in warehouses and factories to help automate the following tasks:
- Taking items out of boxes
- Putting them into boxes
- Moving items from one place to another or to specific storage locations
The arms of pick and place robots are equipped with end effectors similar to human hands that are specifically designed for picking various types of objects. These may include components that are further used in the manufacturing processes of products.
What do pick and place robots do?
More specifically, pick and place robots are commonly used for the following types of tasks:
- Picking objects of different shapes and sizes that need to be placed into boxes or onto conveyors
- Moving haphazardly stockpiled items to other locations within a warehouse
- Kitting – moving small items onto a platform so that they can be moved together to other locations within a facility
- And many more applications
The picking procedure
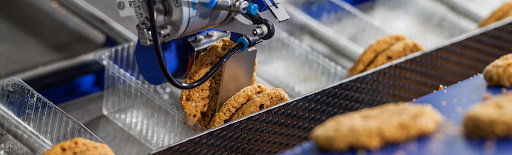
(Photo courtesy of PWR Pack)
Pick and place robots have a wide range of capabilities. Depending on specific application requirements, they can be equipped with several types of end effectors. The most common ones include vacuum grippers with suction cups, fingered grippers, clawed grippers, magnetic grippers, or custom grippers. To achieve a high level of flexibility, pick and place robots are often equipped with multiple arms and heads. This helps them approach objects from several angles at any given time.
Pick and place robots can significantly enhance the whole manufacturing process on production lines. On the one hand, they boost productivity and speed and on the other, they save space.
For example, a conveyor-based system may include a series of different compartments for unique purposes. Pick and place robots can be programmed for specific objects, which means that they can pick items of specified shapes and colors and drop them off in the right compartment.
Pick and place robots in manufacturing
By using multiple arms equipped with suction cups or vacuum force mechanisms, pick and place robots enable manufacturers to automate the widest range of pick and place tasks, including assembly processes.
Multiple arms enable robots to grab several objects at once. They can manipulate very small as well as large objects, which makes them ideal for automated manufacturing lines that work with a wide range of different items.
For instance, technology companies often manufacture devices of different shapes and sizes. Similarly, car manufacturers produce both large SUVs as well as compact cars. Pick and place robots can handle all the different types of objects effectively and fast.
Pick and place robots equipped with machine vision

(Photo courtesy of PWR Pack)
To be able to perform all the above-discussed tasks, robots need to be able to see. 3D vision is necessary for precise recognition and reliable picking of items – without it, robots are blind and dumb. There are a number of 3D vision technologies on the market – Photoneo’s 3D scanners and 3D cameras ensure robust performance in the most challenging industrial settings.
Check out our PhoXi 3D Scanners if your project requires 3D scanning of static scenes in submillimeter accuracy and resolution or our MotionCam-3D if you need to scan fast-moving objects in unrivaled quality.
If you require assistance with choosing the right 3D vision for your projects, do not hesitate to contact the Photoneo team: