Other
Latest applications

Dynamic generation of robot trajectory for automated pressure washing of heavy machinery
Partner: The application is part of the TRINITY project, including: Centria University of Applied Sciences…
Bin picking application in a university lab
Partner: JAMK University of Applied Sciences Challenge: The JAMK University of Applied Sciences provides…
Robotic pick & place application for creative industries
Partner: Creative Robotics Challenge: The customer Creative Robotics is a research unit within the…
Precise picking & placement of pipe parts
Partners: Mitec Enginy, S.L. Bcnvision Challenge: The customer Isotubi, S.L., which is a part…
Automated inspection of heat exchangers
Partner: DAIKIN Pilsen Challenge: The plant in Pilsen produces over two million air conditioning…
Automated stacking of parts on pallets
Partner: OEM Finland Oy Challenge: The customer Temet International is a Finnish manufacturer of…
Automated handling of heavy gas cylinders
Partner: Tecnalia Challenge: The project objective was to design a prototype of an efficient…
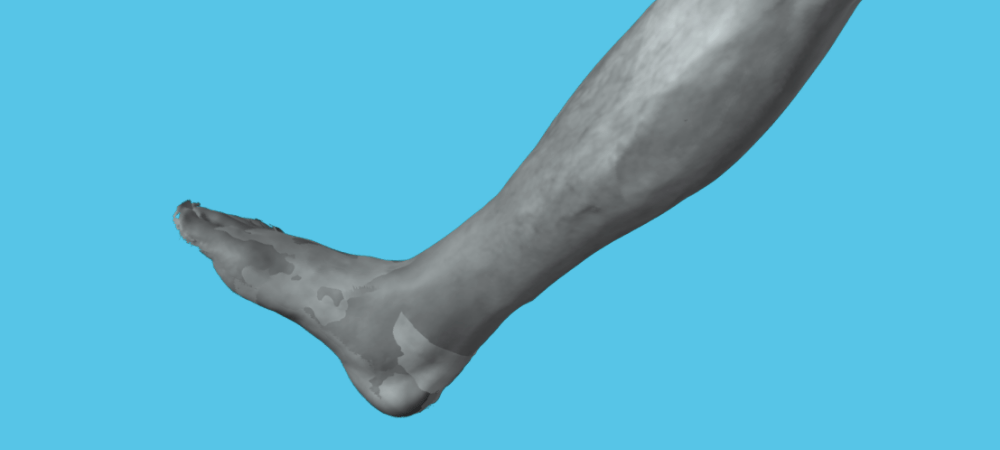
Scanning a human body part
Partners: Subdigital, arx.ace, One3D, BannedStudios End customer: Slovak influencer Michal Yaksha Novotný, F*CKTHEM Challenge: The presumption at…
Automated inspection of caps / seals
The customer decided for inspection using 3D vision by Photoneo as it works also with low-contrast materials.
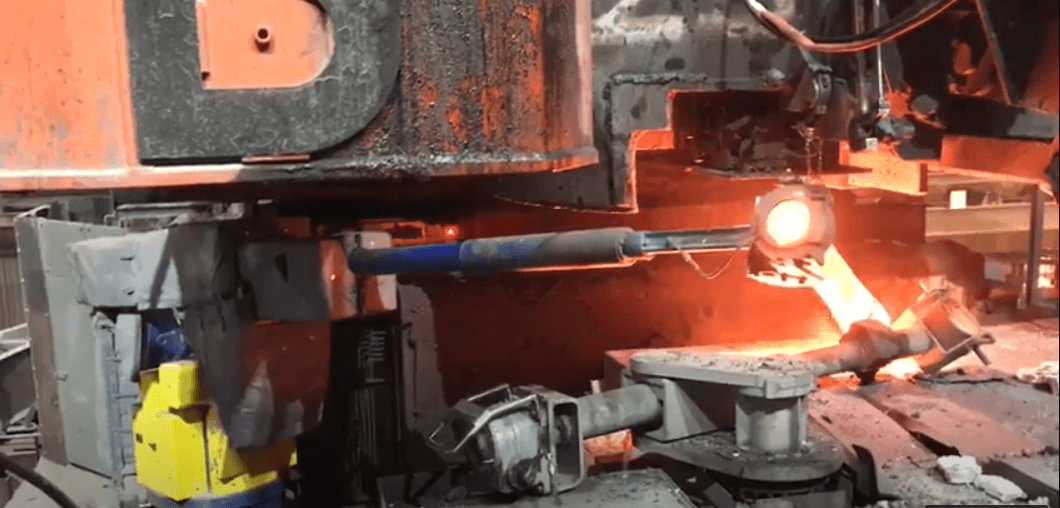
Robot handling of heavy shrouds
PhoXi 3D Scanner used for automated handling of heavy shrouds to increase safety and quality.

Apple core removal system
The first application using Photoneo products in the food industry. An automated solution for the detection of the position and orientation of apple cores and navigation of the robot to remove them.