Projects
Latest applications
Bin picking of heavy metal spheres
Partner: ROSSUM integration s.r.o. Challenge: The customer needed to automate the process of picking…
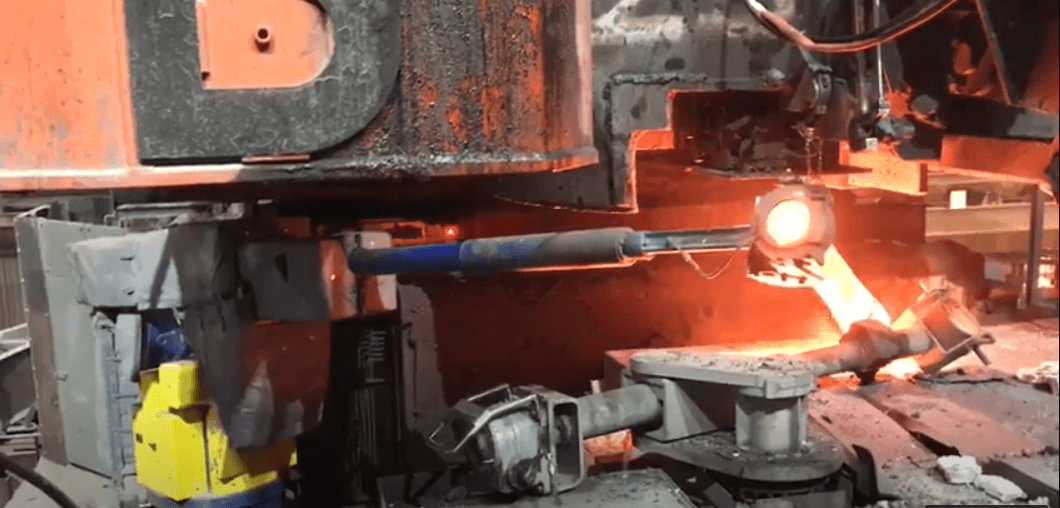
Automated handling of heavy gas cylinders
Partner: Tecnalia Challenge: The project objective was to design a prototype of an efficient…
Picking and placement of flat metal objects
Partner: Robotic SK TN Challenge: The customer BOGE Elastmetall Slovakia SpA from the automotive…
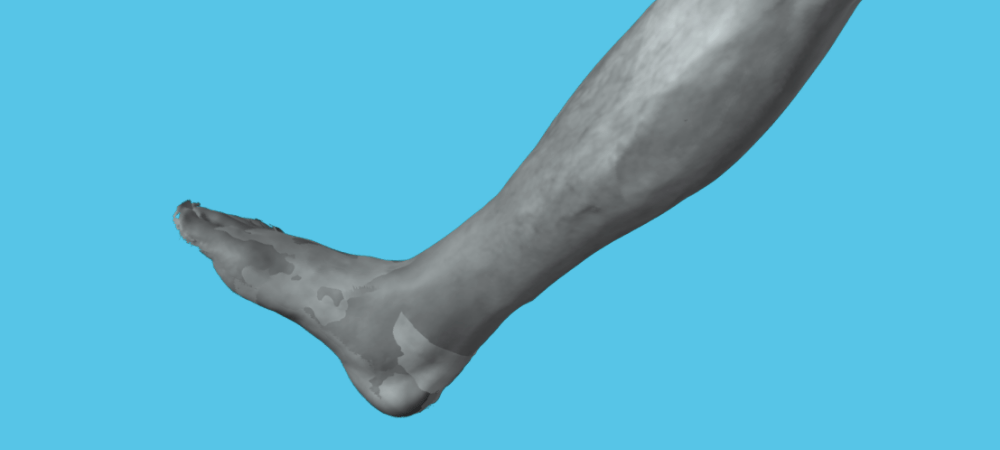
Scanning a human body part
Partners: Subdigital, arx.ace, One3D, BannedStudios End customer: Slovak influencer Michal Yaksha Novotný, F*CKTHEM Challenge: The presumption at…
Automated inspection of caps / seals
The customer decided for inspection using 3D vision by Photoneo as it works also with low-contrast materials.
Robot handling of heavy shrouds
PhoXi 3D Scanner used for automated handling of heavy shrouds to increase safety and quality.
Optimatization of a multi-product production line
Automation of a multi-product production line to create an efficient production system even for shorter series.

Automated picking & placing of heavy, shiny baskets filled with metal parts
Utilizing the latest technology to transform industrial robots into collaborative ones for automated an pick & place application.
Bin picking of entangled metallic hooks
An automated solution for picking metal hooks out of a cluttered pile and inserting them into a press.
Bin picking of shiny metal parts
An automated solution for bin picking of randomly placed, glossy objects from boxes in five layers.

Bin picking of flywheels
An automated solution for handling dual mass flywheels, from deterministic picking to welding.